OpenMind integra a transparência na sociedade das máquinas, unificando mente e ordem
Além dos Agentes de IA, robôs físicos representam mais um importante segmento de aplicação vertical na era da inteligência artificial. Segundo um relatório do Morgan Stanley, o mercado global de robôs humanóides pode ultrapassar US$ 5 trilhões até 2050.
Com o avanço da IA, robôs vêm evoluindo de braços mecânicos industriais para companheiros presentes em nosso cotidiano, adquirindo percepção, compreensão e até mesmo capacidade de decisão de forma autônoma. O desafio atual reside na ausência de protocolos de comunicação padronizados: cada fabricante adota sua própria linguagem e lógica, com softwares incompatíveis e inteligências que não se comunicam. É como ter um carro de uma marca e um Tesla, que não conseguem nem avaliar juntos as condições da estrada, muito menos executar tarefas em parceria.
A OpenMind propõe transformar esse cenário fragmentado. Sua missão não é fabricar robôs, e sim estabelecer um sistema colaborativo em que máquinas falem a mesma língua, sigam regras comuns e executem tarefas coletivamente. Para ilustrar, iOS e Android possibilitaram a explosão de aplicativos móveis, o Ethereum criou a base comum do universo cripto, e a OpenMind busca estabelecer um “sistema operacional” e uma “rede colaborativa” globais para robôs.
Em resumo, a OpenMind está desenvolvendo um sistema operacional universal capaz de permitir que robôs não apenas percebam e atuem, mas também colaborem de forma segura e em escala, em qualquer ambiente, por meio de coordenação descentralizada.
Quem Apoia Esta Plataforma Aberta
A OpenMind já captou US$ 20 milhões nas rodadas seed e Série A sob liderança da Pantera Capital. Ainda mais relevante, a diversidade e complementaridade dos investidores reuniram praticamente todas as peças-chave desse setor: de um lado, forças tradicionais de tecnologia e capital ocidentais—Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, Primitive Ventures—que compreendem as mudanças estruturais nos mundos cripto e IA e agregam know-how em modelos, redes e conformidade para impulsionar a “economia dos agentes + internet das máquinas”; de outro, impulso industrial do Oriente—no caso, representado pela experiência da Sequoia China em cadeia de suprimentos e manufatura—, que conhece os requisitos técnicos e de custos para transformar protótipos em produtos escaláveis. Essa união proporciona à OpenMind não só financiamento, mas também caminhos e recursos “do laboratório à produção, do software à base fabril”.

Esse caminho também converge com o mercado financeiro tradicional. Em junho de 2025, quando a KraneShares lançou o ETF Global Humanoid and Embodied Intelligence Index (KOID), elegeu a Iris—robô humanóide personalizado em parceria entre OpenMind e RoboStore—para soar o sino de abertura da NASDAQ, tornando-se o primeiro “robô convidado” a realizar tal feito na história da bolsa. O acontecimento simboliza a convergência entre tecnologia e finanças e sinaliza publicamente “como ativos de máquinas podem ser precificados e liquidados”.
Como observou Nihal Maunder, sócio da Pantera Capital:
“Se queremos máquinas inteligentes atuando em ambientes abertos, precisamos de uma rede de inteligência aberta. O que a OpenMind faz pelos robôs se assemelha ao que o Linux fez pelo software e o Ethereum pela blockchain.”
Da Pesquisa à Produção
Jan Liphardt, fundador da OpenMind, é professor associado em Stanford e ex-docente de Berkeley, com ampla experiência em pesquisa de dados e sistemas distribuídos, unindo sólido embasamento acadêmico e de engenharia. É defensor do open source, preconiza a substituição de sistemas proprietários por mecanismos auditáveis e rastreáveis e aposta em abordagens interdisciplinares envolvendo IA, robótica e criptografia.
O time central da OpenMind reúne profissionais de instituições como OKX Ventures, Oxford Robotics Institute, Palantir, Databricks e Perplexity, abrangendo áreas-chave como controle de robôs, percepção e navegação, orquestração multimodal e linguagem natural, sistemas distribuídos e protocolos blockchain. Um conselho consultivo formado por autoridades acadêmicas e de mercado (incluindo Steve Cousins, líder de robótica da Stanford, Bill Roscoe do Oxford Blockchain Center e o professor de IA e segurança da Imperial College, Alessio Lomuscio) garante robôs seguros, conformes e confiáveis.
A Solução OpenMind: Arquitetura em Duas Camadas, Um Sistema de Ordem
A OpenMind desenvolveu uma infraestrutura reutilizável que permite que robôs se comuniquem e cooperem entre diferentes dispositivos, fabricantes e até mesmo países:
Lado do Dispositivo: entrega o sistema operacional de IA nativo OM1 para robôs físicos, conectando toda a cadeia da percepção até a execução e possibilitando que diferentes máquinas entendam ambientes e realizem tarefas;
Lado de Rede: implementa a rede descentralizada de colaboração FABRIC, oferecendo mecanismos para identidade, distribuição de tarefas e comunicação, garantindo que robôs possam reconhecer parceiros, dividir tarefas e compartilhar status ao colaborar.
Essa integração “sistema operacional + camada de rede” possibilita não só atuação individual, mas colaboração, alinhamento de processos e execução de tarefas complexas em rede colaborativa unificada.
OM1: Sistema Operacional Nativo de IA para o Mundo Físico
Assim como smartphones dependem de iOS ou Android para rodar aplicativos, robôs precisam de um sistema operacional próprio para executar modelos de IA, processar dados de sensores, tomar decisões e agir.
É aqui que entra o OM1: um sistema operacional nativo de IA para robôs reais, permitindo-lhes perceber, entender, planejar e cumprir tarefas em múltiplos ambientes. Diferente dos sistemas de controle fechados, o OM1 é open source, modular e agnóstico em relação ao hardware, funcionando em diferentes formatos como robôs humanóides, quadrúpedes, com rodas ou braços robóticos.
Quatro Elementos Centrais: Da Percepção à Ação
O OM1 organiza a inteligência robótica em quatro etapas universais: Percepção → Memória → Planejamento → Ação. Todo o processo é modularizado e conectado por uma linguagem de dados unificada, permitindo que capacidades inteligentes sejam compostas, trocadas e auditadas.
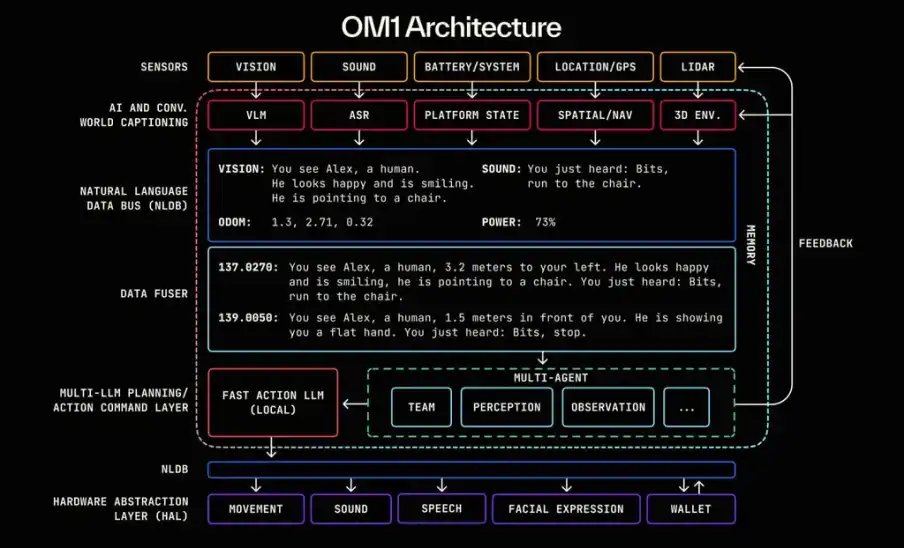
Estrutura do OM1
Em detalhes, a arquitetura em sete camadas do OM1 funciona assim:
Camada de Sensores: capta informações de câmeras, LIDAR, microfones, bateria, GPS e outros sensores multimodais.
Camada de IA + Legenda do Mundo: converte inputs visuais, de áudio e status em descrições em linguagem natural via modelos multimodais (ex.: “Você vê uma pessoa acenando”).
Natural Language Data Bus (NLDB): transporta os dados de percepção, convertidos em fragmentos de linguagem com registro temporal, entre os módulos.
Data Fuser: integra múltiplas fontes de entrada e gera o contexto completo (prompt) para a tomada de decisão.
Camada de Planejamento/Decisão Multi-IA: múltiplos modelos de linguagem leem o contexto e geram planos de ação baseados também em regras blockchain.
Canal downstream do NLDB: repassa as decisões à execução de hardware via camada intermediária de linguagem.
Camada de Abstração de Hardware: traduz comandos em linguagem para instruções de baixo nível, ativando movimentos, sons, transações etc.
Início Rápido, Implementação em Larga Escala
Para transformar rapidamente uma ideia em tarefa executada por robôs, o OM1 dispõe de uma pipeline de desenvolvimento pronta: desenvolvedores definem metas e restrições em linguagem natural, com modelos avançados gerando pacotes de habilidades reutilizáveis em horas, em vez de meses de programação; pipelines multimodais integram LiDAR, visão e áudio nativamente, eliminando código de fusão manual de sensores; modelos já integrados como GPT-4o, DeepSeek e VLMs tornam comandos de voz plug-and-play; total compatibilidade com ROS2 e Cyclone DDS e integração fluida com Unitree G1, Go2, Turtlebot e braços robóticos via Camada de Abstração de Hardware; conexão nativa com as interfaces do FABRIC para identidade, orquestração de tarefas e liquidação on-chain, habilitando robôs tanto para operação independente como participação em rede colaborativa global, com cobrança por uso e auditoria.
O OM1 já foi validado em diversos ambientes reais: a plataforma quadrúpede Frenchie (Unitree Go2) cumpriu tarefas de campo na USS Hornet Defense Technology Exhibition 2024; a plataforma humanóide Iris (Unitree G1) protagonizou interações humano-máquina no estande da Coinbase na EthDenver 2025 e entrou em disciplinas universitárias pelo projeto de educação RoboStore (um dos maiores distribuidores Unitree nos EUA), levando a metodologia também ao ensino e pesquisa de ponta.
FABRIC: Rede Descentralizada de Colaboração Homem-Máquina
Mesmo com inteligências autônomas avançadas, robôs permanecerão ilhados se não conseguirem cooperar de modo confiável. A fragmentação advém de três questões centrais: identidade e localização não são padronizadas ou passíveis de verificação, o que dificulta a confiança de terceiros em “quem sou, onde estou, o que faço”; habilidades e dados carecem de autorizações controladas para serem compartilhados entre diversos agentes; responsabilidade e direitos de controle são difusos, com parâmetros operacionais, escopo de autorização e mecanismos de verificação difíceis de formalizar ou auditar posteriormente. O FABRIC resolve essas dores com uma solução sistêmica: protocolos descentralizados conferem identidades blockchain verificáveis a robôs e operadores, fornecendo estrutura integrada para publicação e matching de tarefas, comunicação criptografada fim a fim, registros de execução e liquidação automática, transformando colaborações de “laços temporários” em “instituições documentadas”.
Na prática, o FABRIC opera como camada de rede combinando “posicionamento, conexão e agendamento”: identidade e localização são constantemente assinadas e validadas, tornando pares visíveis e rastreáveis; canais ponto a ponto funcionam como túneis criptografados sob demanda, permitindo controle e monitoramento remotos sem IP público ou configuração complexa; toda a jornada, da divulgação à aceitação, execução e verificação de tarefas, é padronizada e registrada, permitindo tanto repartição automática de ganhos e devolução de depósitos, quanto conferência de “quem fez o quê, quando e onde” em contextos de compliance ou seguro. Cenários típicos tornam-se viáveis: empresas podem manter equipamentos remotamente em diferentes localidades, cidades podem transformar serviços como limpeza, inspeção e entrega em Robot-as-a-Service de larga escala, frotas de máquinas reportam obstáculos e condições viárias em tempo real para mapas compartilhados e, quando necessário, robôs próximos são enviados para escaneamento 3D, avaliação predial ou coleta de evidência para seguros.
Com identidade, tarefas e liquidação sob a mesma rede, limites de colaboração são definidos previamente, execuções validadas depois e o uso de habilidades passa a ser mensurável em custos e benefícios. No longo prazo, o FABRIC tende a se tornar uma camada global de distribuição de aplicações de inteligência de máquina: habilidades circulam mundialmente com autorizações programáveis e dados operacionais alimentam modelos e estratégias, permitindo que toda a rede colaborativa evolua continuamente em ambiente confiável.
Web3: “Abertura” Codificada na Sociedade das Máquinas
A indústria robótica converge para poucas plataformas, mantendo hardware, algoritmos e redes em ambientes fechados. O diferencial da descentralização está na possibilidade de robôs de qualquer marca e país colaborarem, trocarem habilidades e concluírem liquidações numa única rede aberta, sem centralização em uma única plataforma. A lógica de ordem da OpenMind é implementada por infraestrutura blockchain: cada robô e operador conta com identidade on-chain própria (ERC-7777, padrão de identidade), além de impressões digitais e permissões verificáveis; tarefas são publicadas, disputadas e alocadas sob regras públicas, gerando provas criptografadas on-chain com registro temporal e geográfico; contratos automáticos liquidam lucros, seguros e depósitos após execução de tarefas, com resultados auditáveis em tempo real; novas habilidades estabelecem limites de uso e compatibilidade via contratos, garantindo circulação global e proteção de propriedade intelectual. Assim, a economia robótica já nasce antimonopolista, componível e auditável, com “abertura” inscrita nos protocolos fundamentais da sociedade de máquinas.
Romper o Isolamento da Inteligência Corporificada
Robôs deixam o palco das feiras para ambientes reais: monitoram enfermarias, aprendem em universidades, inspecionam e modelam espaços urbanos. O desafio não está apenas em motores mais potentes, mas em promover confiança, troca de dados e colaboração entre máquinas de diferentes origens; acima da tecnologia, canais de distribuição e fornecimento passam a ser decisivos para o crescimento em escala.
Por isso, o caminho prático da OpenMind privilegia o desenvolvimento de canais em vez do acúmulo tecnológico isolado. Em parceria com a RoboStore (um dos maiores distribuidores Unitree nos EUA), transformaram o OM1 em currículo e kits experimentais padronizados, levando hardware e software a milhares de universidades norte-americanas. O setor educacional representa demanda estável, ao inserir OM1 diretamente na trilha de formação de desenvolvedores e aplicações do futuro.
Para alcançar distribuição mais ampla, a OpenMind aproveita sua rede de investidores e cria “canais de exportação de software” baseados em plataforma. Ecossistemas cripto robustos, como o Pi, expandem esse potencial e fomentam um ciclo virtuoso entre desenvolvedores, usuários e clientes pagantes. Com canais de educação garantindo oferta estável e distribuição via plataforma gerando demanda de escala, OM1 e aplicações derivadas conquistam um alvo de expansão replicável.
Na era Web2, robôs normalmente ficavam trancados em stacks proprietários de cada fabricante, impedindo a circulação de funções e dados entre plataformas; ao integrar padrões educacionais e canais de distribuição, a OpenMind faz da abertura seu padrão: o mesmo sistema migra do ensino para a indústria e se expande por toda a rede, estabelecendo a abertura como ponto de partida para adoção em larga escala.
Avisos:
- Este artigo foi republicado de BlockBeats e os direitos autorais pertencem ao autor original BlockBeats. Caso haja objeções à republicação, entre em contato com a equipe Gate Learn, que tomará as providências necessárias, com prioridade.
- Aviso: As opiniões expressas neste artigo são exclusivamente do autor e não constituem recomendação de investimento.
- As traduções do artigo para outros idiomas foram realizadas pela equipe Gate Learn e não devem ser copiadas, distribuídas ou plagiadas sem citação da Gate.
Artigos Relacionados

O que são narrativas cripto? Principais narrativas para 2025 (ATUALIZADO)

Sentient: Misturando o Melhor dos Modelos de IA Aberta e Fechada

O que é AIXBT por Virtuals? Tudo o que você precisa saber sobre AIXBT

Visão geral das 10 principais moedas AI Meme

Explorando o Smart Agent Hub: Sonic SVM e seu Framework de Escalonamento HyperGrid
